技術資料
Feel&Think
第3回 変形問題とカルマンフィルタ
担当:里 優
2020.03
今回からは、変形問題の逆解析にカルマンフィルタを適用する方法を検討してみます。変形から地盤の剛性を推定する問題を想定すると、「観測値」は変形、推定する「状態」は剛性となり、前回まで説明した状態空間モデルを使うことはできません。この場合は「状態」に係数を加えた次のようなモデルを用います。
(観測方程式)

(状態方程式)

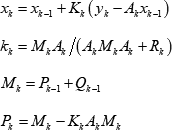
係数Aをうまく使うことで、変形と剛性からなる観測方程式ができそうです。なお、カルマンフィルタは以下のようになります。
(フィルタ方程式)
ここで、下図のような変形問題を考えます。Eのヤング率を持つ棒にFの荷重が加わっており、uの変形が観測されています。これを状態空間モデルで表現し、カルマンフィルタによって観測された変形よりヤング率を推定しようという訳です。
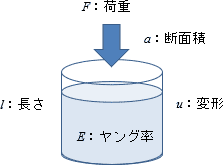
図の問題では、変形が次式で与えられます。
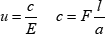
また、推定すべき「状態」はヤング率です。

観測方程式を作るため、観測値は理論値の近辺にあるとすると、
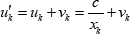
となり、「状態」に係数を乗じた式にはなりません。そこで、次のように線形化と呼ばれる処理を施します。上式は次のように書くことができます。

まず、非線形関数![]() を
を![]() まわりでTaylor展開し2次の項以降を無視すると、
まわりでTaylor展開し2次の項以降を無視すると、

となります。これを先の式に代入して整理すると、

が得られます。ここで、新しい観測値を次式で定義します。
これを先の式に代入して整理すると、次のように観測方程式ができあがります。

図に示した問題では、
となります。一方、フィルタ方程式は、

ですが、
を考慮すれば、

となり、実際の観測値を用いて「状態」が補正されます。
これらの過程の理解を深めるため、次回もExcelのVBAを使ってカルマンフィルタを作ってみます。